
MySensors – Ogólny poradnik z przykładami.
Długo zastanawiałem się jaki wpis na blogu zrobić na temat MySensors. Ponieważ jest to oddzielna odnoga tak jak google home, node red itd. Zdecydowałem, że zrobię wszystko w jednym poście, bo ja w sumie będę potrzebował tylko dwóch efektów, ale przygotuje po to oddzielna kategorie i gdy nie będę miał co omawiać, lub wy będziecie mieli pytania, to będę uzupełniał, albo ten wpis, albo będę robił nowe wpisy.
MySensors dla mnie to połączenie arduino razem z raspberry pi. Programujemy MySensors w środowisku arduino, więc jeżeli ktoś już miał styczność z arduino to będzie mu na pewno prościej. MySensors to również środowisko dosyć specyficzne, ale dające dużo możliwości, bo nie ogranicza nas soft, bo w końcu go sami tworzymy. Korzystamy oczywiście z gotowych rozwiązań, ale możemy w kod wplatać własne wstawki.
Przejdźmy do podstaw, czyli musimy pobrać arduino:
– Link do pobrania arduino
Cały poradnik postaram się uprościć, więc będzie mocne spłycanie tematów, więć jeżeli Twoja wiedza jest ponad podstawę, to nic nowego nie dowiesz się z tego poradnika, ale jeżeli dopiero zaczynasz, to poradnik okaże się pomocny.
Arduino opiera się na „bilbliotekach”, czyli przykładowych kodach, ale w skład tego wchodzą również pliki, które są wysyłane do arduino bez konieczności ich edycji. W praktyce to bez tych plików nie zadziała nasz sketch.
#include <MySensors.h>
Powyżej widzimy przykład takiego pliku i nie mamy go w zakładkach, więc przepisanie całego kodu, ale nie posiadając tego pliku, nie pozwoli nam uruchomić prawidłowo sketch, żeby prawidłowo kod działał.
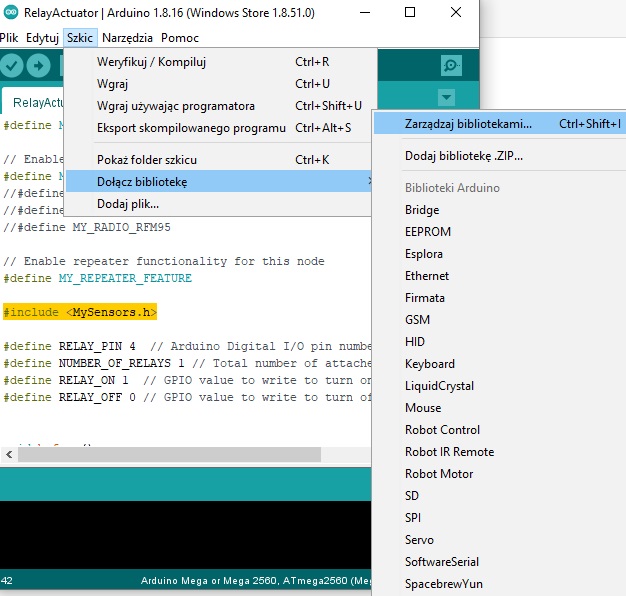
W Arduino otwieramy Szkic>>Dołącz bibliotekę>>Zarządzaj bibliotekami:
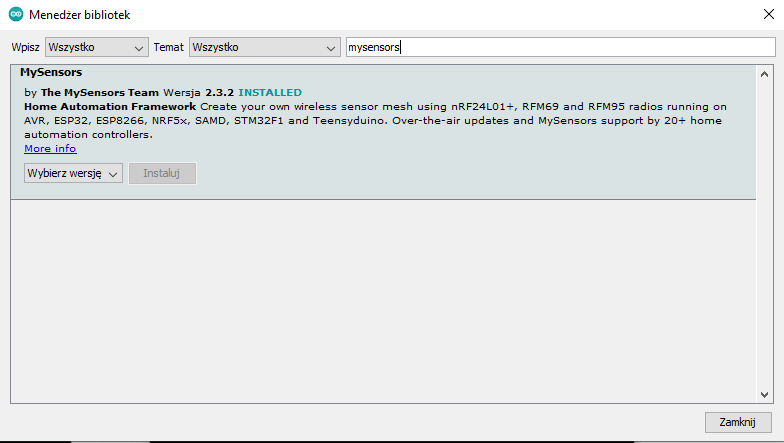
Wyszukujemy bibliotekę MySensors i instalujemy. Poniższe zdjęcie ma wyszarzony przycisk instaluj, bo tę bibliotekę mam już zainstalowaną.
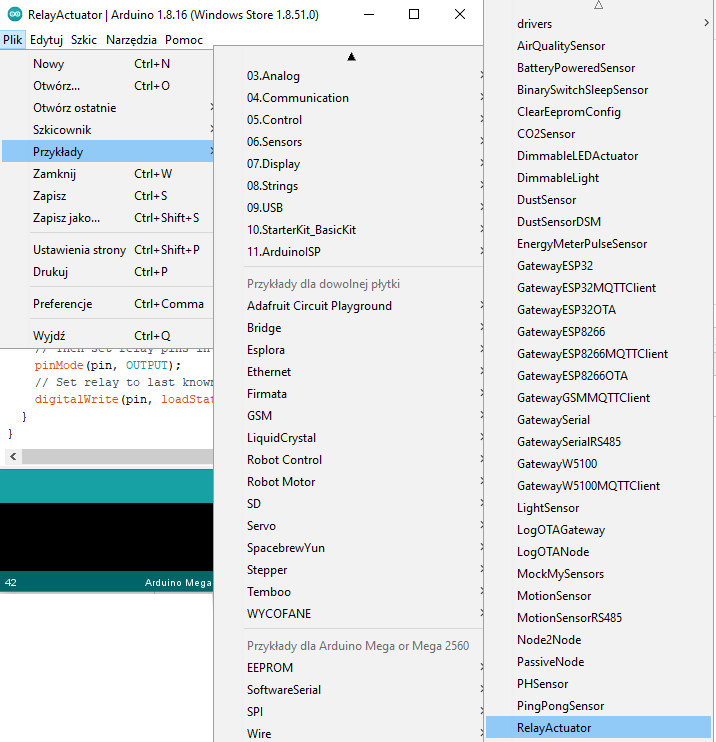
Po zainstalowaniu możemy od razu przejść do przykładów MySensors. W moim projekcie będę potrzebował sterowanie pinami w arduino mega i obsługą tego w domoticzu. Użyjemy do tego dwóch przykładów:
Wchodzimy Plik >> Przykłady >> MySensors >> RelayActuator
Dostajemy w Arduino kod, który będzie wymagał poprawek:
/* The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2019 Sensnology AB * Full contributor list: https://github.com/mysensors/MySensors/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * DESCRIPTION * The ArduinoGateway prints data received from sensors on the serial link. * The gateway accepts input on serial which will be sent out on radio network. * * The GW code is designed for Arduino Nano 328p / 16MHz * * Wire connections (OPTIONAL): * - Inclusion button should be connected between digital pin 3 and GND * - RX/TX/ERR leds need to be connected between +5V (anode) and digital pin 6/5/4 with resistor 270-330R in a series * * LEDs (OPTIONAL): * - To use the feature, uncomment any of the MY_DEFAULT_xx_LED_PINs * - RX (green) - blink fast on radio message received. In inclusion mode will blink fast only on presentation received * - TX (yellow) - blink fast on radio message transmitted. In inclusion mode will blink slowly * - ERR (red) - fast blink on error during transmission error or receive crc error */
// Enable debug prints to serial monitor
#define MY_DEBUG
// Enable and select radio type attached
#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Enable repeater functionality for this node
#define MY_REPEATER_FEATURE
#include <MySensors.h>
#define RELAY_PIN 4 // Arduino Digital I/O pin number for first relay (second on pin+1 etc)
#define NUMBER_OF_RELAYS 1 // Total number of attached relays
#define RELAY_ON 1 // GPIO value to write to turn on attached relay
#define RELAY_OFF 0 // GPIO value to write to turn off attached relay
void before()
{
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Then set relay pins in output mode
pinMode(pin, OUTPUT);
// Set relay to last known state (using eeprom storage)
digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF);
}
}
void setup()
{
}
void presentation()
{
// Send the sketch version information to the gateway and Controller
sendSketchInfo("Relay", "1.0");
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Register all sensors to gw (they will be created as child devices)
present(sensor, S_BINARY);
}
}
void loop()
{
}
void receive(const MyMessage &message)
{
// We only expect one type of message from controller. But we better check anyway.
if (message.getType()==V_STATUS) {
// Change relay state
digitalWrite(message.getSensor()-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF);
// Store state in eeprom
saveState(message.getSensor(), message.getBool());
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.getSensor());
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
W kodzie znajdziemy linijkę odpowiadającą za łączność RF433
#define MY_RADIO_RF24
Zmieniamy na:
//#define MY_RADIO_RF24
Dodanie dwóch ukośników powoduje, że funkcja nie będzie wykonywana.
S_BINARY
Zmieniamy na:
S_LIGHT
Najważniejszy fragment kodu spolszczyłem:
#define RELAY_PIN 4 // Numer pinu Arduino Digital I/O dla pierwszego przekaźnika
#define NUMBER_OF_RELAYS 3 // Całkowita liczba podłączonych przekaźników.
#define RELAY_ON 1 // Wartość GPIO, aby włączyć przekaźnik
#define RELAY_OFF 0 // Wartość GPIO, aby wyłączyć przekaźnik
Nie jest on zbyt jasny więc wyjaśnię mamy tutaj RELAY_PIN 4 jest to pin startowy, od którego będziemy liczyć piny. Następnie mamy NUMBER_OF_RELAYS 3 wartość 3 określa ilość pinów po GPIO 4, czyli mamy GPIO 5, GPIO 6. Łącznie daje nam to 3 GPIO, czyli zgodnie z tym co określimy.
W powyższy sposób mamy obsługę wychodzących naszych pinów z arduino mega, ale brakuje nam komunikacji przez USB, więc skorzystajmy z przykładu:
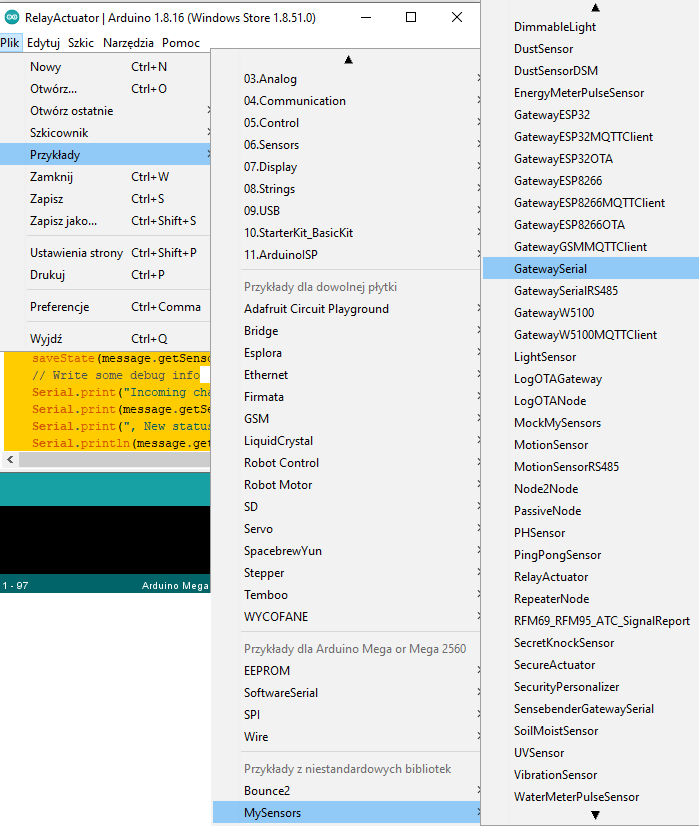
GatewaySerial:
/* The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2019 Sensnology AB * Full contributor list: https://github.com/mysensors/MySensors/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * DESCRIPTION * The ArduinoGateway prints data received from sensors on the serial link. * The gateway accepts input on serial which will be sent out on radio network. * * The GW code is designed for Arduino Nano 328p / 16MHz * * Wire connections (OPTIONAL): * - Inclusion button should be connected between digital pin 3 and GND * - RX/TX/ERR leds need to be connected between +5V (anode) and digital pin 6/5/4 with resistor 270-330R in a series * * LEDs (OPTIONAL): * - To use the feature, uncomment any of the MY_DEFAULT_xx_LED_PINs * - RX (green) - blink fast on radio message received. In inclusion mode will blink fast only on presentation received * - TX (yellow) - blink fast on radio message transmitted. In inclusion mode will blink slowly * - ERR (red) - fast blink on error during transmission error or receive crc error * *//* * The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2019 Sensnology AB * Full contributor list: https://github.com/mysensors/MySensors/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * DESCRIPTION * The ArduinoGateway prints data received from sensors on the serial link. * The gateway accepts input on serial which will be sent out on radio network. * * The GW code is designed for Arduino Nano 328p / 16MHz * * Wire connections (OPTIONAL): * - Inclusion button should be connected between digital pin 3 and GND * - RX/TX/ERR leds need to be connected between +5V (anode) and digital pin 6/5/4 with resistor 270-330R in a series * * LEDs (OPTIONAL): * - To use the feature, uncomment any of the MY_DEFAULT_xx_LED_PINs * - RX (green) - blink fast on radio message received. In inclusion mode will blink fast only on presentation received * - TX (yellow) - blink fast on radio message transmitted. In inclusion mode will blink slowly * - ERR (red) - fast blink on error during transmission error or receive crc error * */
// Enable debug prints to serial monitor
#define MY_DEBUG
// Enable and select radio type attached
#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <MySensors.h>
void setup()
{
// Setup locally attached sensors
}
void presentation()
{
// Present locally attached sensors
}
void loop()
{
// Send locally attached sensor data here
}
Powyższy kod służy do komunikacji przez USB, ale połączymy sobie komunikacje razem z przełącznikami Relay i mamy:
/* The MySensors Arduino library handles the wireless radio link and protocol * between your home built sensors/actuators and HA controller of choice. * The sensors forms a self healing radio network with optional repeaters. Each * repeater and gateway builds a routing tables in EEPROM which keeps track of the * network topology allowing messages to be routed to nodes. * * Created by Henrik Ekblad <henrik.ekblad@mysensors.org> * Copyright (C) 2013-2019 Sensnology AB * Full contributor list: https://github.com/mysensors/MySensors/graphs/contributors * * Documentation: http://www.mysensors.org * Support Forum: http://forum.mysensors.org * * This program is free software; you can redistribute it and/or * modify it under the terms of the GNU General Public License * version 2 as published by the Free Software Foundation. * ******************************* * * DESCRIPTION * The ArduinoGateway prints data received from sensors on the serial link. * The gateway accepts input on serial which will be sent out on radio network. * * The GW code is designed for Arduino Nano 328p / 16MHz * * Wire connections (OPTIONAL): * - Inclusion button should be connected between digital pin 3 and GND * - RX/TX/ERR leds need to be connected between +5V (anode) and digital pin 6/5/4 with resistor 270-330R in a series * * LEDs (OPTIONAL): * - To use the feature, uncomment any of the MY_DEFAULT_xx_LED_PINs * - RX (green) - blink fast on radio message received. In inclusion mode will blink fast only on presentation received * - TX (yellow) - blink fast on radio message transmitted. In inclusion mode will blink slowly * - ERR (red) - fast blink on error during transmission error or receive crc error * */
// Enable debug prints to serial monitor
#define MY_DEBUG
// Enable and select radio type attached
//#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
//#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <MySensors.h>
#define RELAY_PIN 22 // Arduino Digital I/O pin number for first relay (second on pin+1 etc)
#define NUMBER_OF_RELAYS 9 // Total number of attached relays
#define RELAY_ON 1 // GPIO value to write to turn on attached relay
#define RELAY_OFF 0 // GPIO value to write to turn off attached relay
void before()
{
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Then set relay pins in output mode
pinMode(pin, OUTPUT);
// Set relay to last known state (using eeprom storage)
digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF);
}
}
void setup()
{
}
void presentation()
{
// Send the sketch version information to the gateway and Controller
sendSketchInfo("Relay", "1.0");
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Register all sensors to gw (they will be created as child devices)
present(sensor, S_LIGHT);
}
}
void loop()
{
}
void receive(const MyMessage &message)
{
// We only expect one type of message from controller. But we better check anyway.
if (message.getType()==V_STATUS) {
// Change relay state
digitalWrite(message.getSensor()-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF);
// Store state in eeprom
saveState(message.getSensor(), message.getBool());
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.getSensor());
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
Wygląda wszystko super, bo mamy połączoną komunikacje usb pomiędzy arduino mega a raspberry Pi. Pozostała nam jeszcze podłączenie pod USB w domoticzu naszej płytki arduino Mega i sprawdzenie, czy działa.
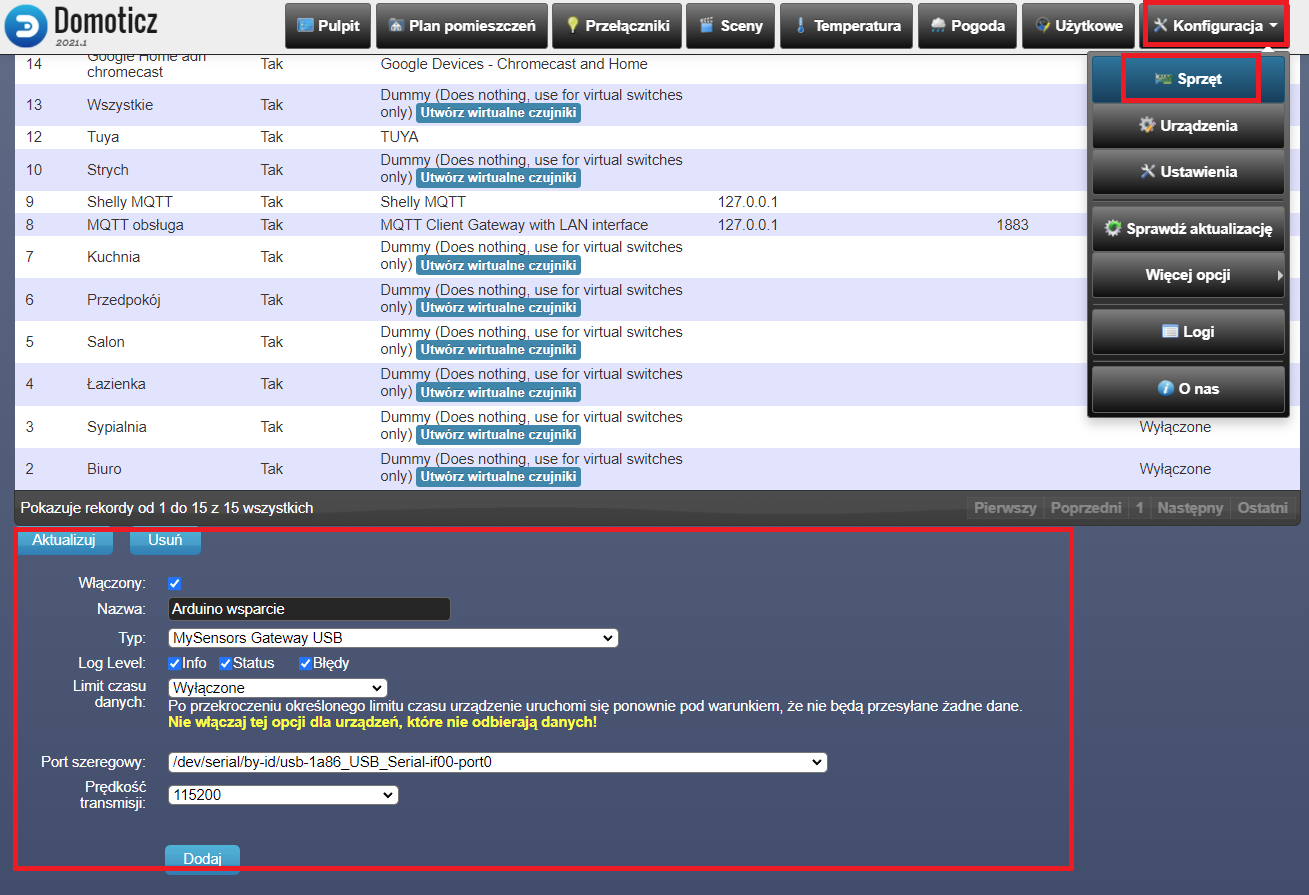
Dodajemy najpierw obsługe, czyli wchodzimy Konfiguracja >> Sprzęt i z listy na dole szukamy „MySensors Gateway USB” po wybraniu wybieramy z listy port szeregowy port do którego jest podłączone nasze arduino i dodajemy własną nazwę w polu Nazwa.
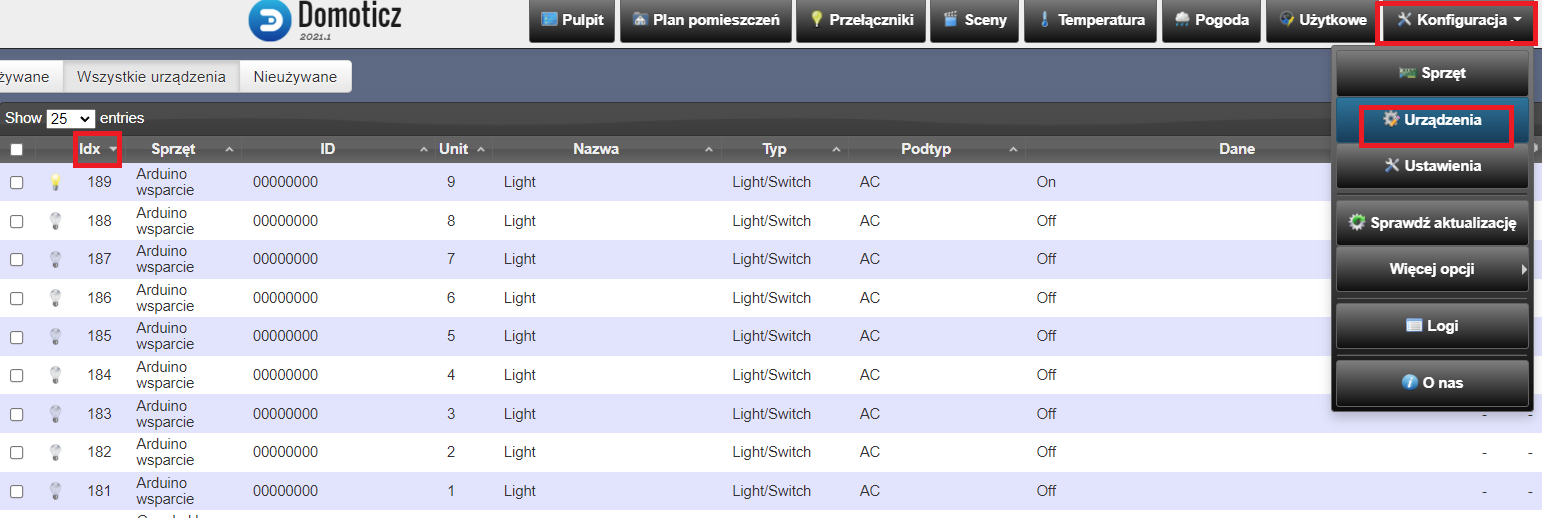
Wchodzimy Konfiguracja >> Urządzenia i segregujemy po IDX. Teraz widzimy wszystkie przekaźniki, które zostały dodane licząć od GPIO 22 do GPIO 30, czyli łącznie 9. Od tej chwili możemy włączać dane wyjścia w naszym arduino za pośrednictwem Domoticza.
Dodawanie przycisków button od zmiany statusu ON/OFF
Zacznijmy od tego, że będziemy potrzebowali nową bibliotekę
Po zainstalowaniu otwórzmy sobie przykład bounce>>more >> Change:
// This example toggles the debug LED (pin 13) on or off
// when a button on pin 2 is pressed.
// Include the Bounce2 library found here :
// https://github.com/thomasfredericks/Bounce2
#include <Bounce2.h>
#define BUTTON_PIN 2
#define LED_PIN 13
int ledState = LOW;
Bounce debouncer = Bounce(); // Instantiate a Bounce object
void setup() {
debouncer.attach(BUTTON_PIN,INPUT_PULLUP); // Attach the debouncer to a pin with INPUT_PULLUP mode
debouncer.interval(25); // Use a debounce interval of 25 milliseconds
pinMode(LED_PIN,OUTPUT); // Setup the LED
digitalWrite(LED_PIN,ledState);
}
void loop() {
debouncer.update(); // Update the Bounce instance
if ( debouncer.fell() ) { // Call code if button transitions from HIGH to LOW
ledState = !ledState; // Toggle LED state
digitalWrite(LED_PIN,ledState); // Apply new LED state
}
}
Po uzupełeniu naszego projektu o przycisk button:
// Enable debug prints to serial monitor
#define MY_DEBUG
// Enable and select radio type attached
//#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
//#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <MySensors.h>
#define RELAY_PIN 22 // Arduino Digital I/O pin number for first relay (second on pin+1 etc)
#define NUMBER_OF_RELAYS 9 // Total number of attached relays
#define RELAY_ON 1 // GPIO value to write to turn on attached relay
#define RELAY_OFF 0 // GPIO value to write to turn off attached relay
#include <Bounce2.h>
#define BUTTON_PIN 1
#define LED_PIN 30
int ledState = LOW;
Bounce debouncer = Bounce(); // Instantiate a Bounce object
MyMessage msg(1,V_LIGHT);
void before()
{
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Then set relay pins in output mode
pinMode(pin, OUTPUT);
// Set relay to last known state (using eeprom storage)
digitalWrite(pin, loadState(sensor)?RELAY_ON:RELAY_OFF);
}
}
void setup()
{
debouncer.attach(BUTTON_PIN,INPUT_PULLUP); // Attach the debouncer to a pin with INPUT_PULLUP mode
debouncer.interval(5); // Use a debounce interval of 25 milliseconds
}
void presentation()
{
// Send the sketch version information to the gateway and Controller
sendSketchInfo("Relay", "1.0");
for (int sensor=1, pin=RELAY_PIN; sensor<=NUMBER_OF_RELAYS; sensor++, pin++) {
// Register all sensors to gw (they will be created as child devices)
present(sensor, S_LIGHT);
}
}
void loop()
{
debouncer.update(); // Update the Bounce instance
if ( debouncer.fell() ) { // Call code if button transitions from HIGH to LOW
ledState = !ledState; // Toggle LED state
saveState(1,ledState);
digitalWrite(LED_PIN,ledState); // Apply new LED state
send(msg.set(ledState));
}
}
void receive(const MyMessage &message)
{
// We only expect one type of message from controller. But we better check anyway.
if (message.getType()==V_STATUS) {
// Change relay state
digitalWrite(message.getSensor()-1+RELAY_PIN, message.getBool()?RELAY_ON:RELAY_OFF);
// Store state in eeprom
saveState(message.getSensor(), message.getBool());
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.getSensor());
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
Powyższy kod obsługuje jeden przycisk monstabilny oraz relay w MySensors.
#define MY_DEBUG
// Enable and select radio type attached
//#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
//#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <SPI.h>
#include <MySensors.h>
#include <Bounce2.h>
#define RELAY_PIN0 30 // Arduino Digital I/O pin number for relay
#define RELAY_PIN1 29
#define RELAY_PIN2 28
#define RELAY_PIN3 27
#define BUTTON_PIN0 1 // Arduino Digital I/O pin number for button
#define BUTTON_PIN1 2 // Arduino Digital I/O pin number for button
#define BUTTON_PIN2 3 // Arduino Digital I/O pin number for button
#define BUTTON_PIN3 4 // Arduino Digital I/O pin number for button
#define CHILD0_ID 100 // Id of the sensor child
#define CHILD1_ID 101 // Id of the sensor child
#define CHILD2_ID 102 // Id of the sensor child
#define CHILD3_ID 103 // Id of the sensor child
#define RELAY_ON 1
#define RELAY_OFF 0
Bounce debouncerA = Bounce();
Bounce debouncerB = Bounce();
Bounce debouncerC = Bounce();
Bounce debouncerD = Bounce();
int oldValueA = 0;
int oldValueB = 0;
int oldValueC = 0;
int oldValueD = 0;
bool stateA;
bool stateB;
bool stateC;
bool stateD;
MyMessage msgA(CHILD0_ID, V_LIGHT);
MyMessage msgB(CHILD1_ID, V_LIGHT);
MyMessage msgC(CHILD2_ID, V_LIGHT);
MyMessage msgD(CHILD3_ID, V_LIGHT);
void setup()
{
// Setup the button
pinMode(BUTTON_PIN0, INPUT_PULLUP);
pinMode(BUTTON_PIN1, INPUT_PULLUP);
pinMode(BUTTON_PIN2, INPUT_PULLUP);
pinMode(BUTTON_PIN3, INPUT_PULLUP);
// After setting up the button, setup debouncer
debouncerA.attach(BUTTON_PIN0);
debouncerA.interval(5);
debouncerB.attach(BUTTON_PIN1);
debouncerB.interval(5);
debouncerC.attach(BUTTON_PIN2);
debouncerC.interval(5);
debouncerD.attach(BUTTON_PIN3);
debouncerD.interval(5);
// Make sure relays are off when starting up
digitalWrite(RELAY_PIN0, RELAY_OFF);
digitalWrite(RELAY_PIN1, RELAY_OFF);
digitalWrite(RELAY_PIN2, RELAY_OFF);
digitalWrite(RELAY_PIN3, RELAY_OFF);
// Then set relay pins in output mode
pinMode(RELAY_PIN0, OUTPUT);
pinMode(RELAY_PIN1, OUTPUT);
pinMode(RELAY_PIN2, OUTPUT);
pinMode(RELAY_PIN3, OUTPUT);
// Set relay to last known state (using eeprom storage)
stateA = loadState(CHILD0_ID);
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF);
stateB = loadState(CHILD1_ID);
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF);
stateC = loadState(CHILD2_ID);
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF);
stateD = loadState(CHILD3_ID);
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF);
}
void presentation() {
// Send the sketch version information to the gateway and Controller
sendSketchInfo("4 Relay & button", "1.0");
// Register all sensors to gw (they will be created as child devices)
present(CHILD0_ID, S_LIGHT);
present(CHILD1_ID, S_LIGHT);
present(CHILD2_ID, S_LIGHT);
present(CHILD3_ID, S_LIGHT);
}
/*
Example on how to asynchronously check for new messages from gw
*/
void loop()
{
debouncerA.update();
// Get the update value
int valueA = debouncerA.read();
if (valueA != oldValueA && valueA == 0) {
send(msgA.set(stateA ? false : true), true); // Send new state and request ack back
}
oldValueA = valueA;
debouncerB.update();
// Get the update value
int valueB = debouncerB.read();
if (valueB != oldValueB && valueB == 0) {
send(msgB.set(stateB ? false : true), true); // Send new state and request ack back
}
oldValueB = valueB;
debouncerC.update();
// Get the update value
int valueC = debouncerC.read();
if (valueC != oldValueC && valueC == 0) {
send(msgC.set(stateC ? false : true), true); // Send new state and request ack back
}
oldValueC = valueC;
debouncerD.update();
// Get the update value
int valueD = debouncerD.read();
if (valueD != oldValueD && valueD == 0) {
send(msgD.set(stateD ? false : true), true); // Send new state and request ack back
}
oldValueD = valueD;
}
void receive(const MyMessage &message) {
// We only expect one type of message from controller. But we better check anyway.
if (message.type == V_LIGHT) {
switch (message.sensor) {
case CHILD0_ID:
stateA = message.getBool();
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF);
saveState(CHILD0_ID, stateA);
break;
case CHILD1_ID:
stateB = message.getBool();
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF);
saveState(CHILD1_ID, stateB);
break;
case CHILD2_ID:
stateC = message.getBool();
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF);
saveState(CHILD2_ID, stateC);
break;
case CHILD3_ID:
stateD = message.getBool();
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF);
saveState(CHILD3_ID, stateD);
break;
}
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
Powyższy kod obsługuje cztery przyciski Monostabilne oraz Relay w MySensors
#define MY_DEBUG
// Enable and select radio type attached
//#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
//#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <SPI.h>
#include <MySensors.h>
#include <Bounce2.h>
#define RELAY_PIN0 30 // Arduino Digital I/O pin number for relay
#define RELAY_PIN1 29
#define RELAY_PIN2 28
#define RELAY_PIN3 27
#define BUTTON_PIN0 1 // Arduino Digital I/O pin number for button
#define BUTTON_PIN1 2 // Arduino Digital I/O pin number for button
#define BUTTON_PIN2 3 // Arduino Digital I/O pin number for button
#define BUTTON_PIN3 4 // Arduino Digital I/O pin number for button
#define CHILD0_ID 100 // Id of the sensor child
#define CHILD1_ID 101 // Id of the sensor child
#define CHILD2_ID 102 // Id of the sensor child
#define CHILD3_ID 103 // Id of the sensor child
#define RELAY_ON 1
#define RELAY_OFF 0
Bounce debouncerA = Bounce();
Bounce debouncerB = Bounce();
Bounce debouncerC = Bounce();
Bounce debouncerD = Bounce();
int oldValueA = 0;
int oldValueB = 0;
int oldValueC = 0;
int oldValueD = 0;
bool stateA = false;
bool stateB = false;
bool stateC = false;
bool stateD = false;
MyMessage msgA(CHILD0_ID, V_LIGHT);
MyMessage msgB(CHILD1_ID, V_LIGHT);
MyMessage msgC(CHILD2_ID, V_LIGHT);
MyMessage msgD(CHILD3_ID, V_LIGHT);
void setup()
{
// Setup the button
pinMode(BUTTON_PIN0, INPUT_PULLUP);
pinMode(BUTTON_PIN1, INPUT_PULLUP);
pinMode(BUTTON_PIN2, INPUT_PULLUP);
pinMode(BUTTON_PIN3, INPUT_PULLUP);
// After setting up the button, setup debouncer
debouncerA.attach(BUTTON_PIN0);
debouncerA.interval(5);
debouncerB.attach(BUTTON_PIN1);
debouncerB.interval(5);
debouncerC.attach(BUTTON_PIN2);
debouncerC.interval(5);
debouncerD.attach(BUTTON_PIN3);
debouncerD.interval(5);
// Make sure relays are off when starting up
digitalWrite(RELAY_PIN0, RELAY_OFF);
digitalWrite(RELAY_PIN1, RELAY_OFF);
digitalWrite(RELAY_PIN2, RELAY_OFF);
digitalWrite(RELAY_PIN3, RELAY_OFF);
// Then set relay pins in output mode
pinMode(RELAY_PIN0, OUTPUT);
pinMode(RELAY_PIN1, OUTPUT);
pinMode(RELAY_PIN2, OUTPUT);
pinMode(RELAY_PIN3, OUTPUT);
}
void presentation() {
// Send the sketch version information to the gateway and Controller
sendSketchInfo("4 Relay & button", "1.0");
// Register all sensors to gw (they will be created as child devices)
present(CHILD0_ID, S_LIGHT);
present(CHILD1_ID, S_LIGHT);
present(CHILD2_ID, S_LIGHT);
present(CHILD3_ID, S_LIGHT);
}
/*
Example on how to asynchronously check for new messages from gw
*/
void loop()
{
debouncerA.update();
// Get the update value
int valueA = debouncerA.read();
if (valueA != oldValueA) {
send(msgA.set(stateA ? false : true), false); // Send new state and request ack back
stateA = stateA ? false : true;
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueA = valueA;
debouncerB.update();
// Get the update value
int valueB = debouncerB.read();
if (valueB != oldValueB) {
send(msgB.set(stateB ? false : true), false); // Send new state and request ack back
stateB = stateB ? false : true;
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueB = valueB;
debouncerC.update();
// Get the update value
int valueC = debouncerC.read();
if (valueC != oldValueC) {
send(msgC.set(stateC ? false : true), false); // Send new state and request ack back
stateC = stateC ? false : true;
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueC = valueC;
debouncerD.update();
// Get the update value
int valueD = debouncerD.read();
if (valueD != oldValueD) {
send(msgD.set(stateD ? false : true), false); // Send new state and request ack back
stateD = stateD ? false : true;
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueD = valueD;
}
void receive(const MyMessage &message) {
// We only expect one type of message from controller. But we better check anyway.
if (message.type == V_LIGHT) {
switch (message.sensor) {
case CHILD0_ID:
stateA = message.getBool();
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF);
saveState(CHILD0_ID, stateA);
break;
case CHILD1_ID:
stateB = message.getBool();
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF);
saveState(CHILD1_ID, stateB);
break;
case CHILD2_ID:
stateC = message.getBool();
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF);
saveState(CHILD2_ID, stateC);
break;
case CHILD3_ID:
stateD = message.getBool();
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF);
saveState(CHILD3_ID, stateD);
break;
}
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
Powyższy kod obsługuje cztery przyciski Bistabilne oraz Relay w MySensors
#define MY_DEBUG
// Enable and select radio type attached
//#define MY_RADIO_RF24
//#define MY_RADIO_NRF5_ESB
//#define MY_RADIO_RFM69
//#define MY_RADIO_RFM95
// Set LOW transmit power level as default, if you have an amplified NRF-module and
// power your radio separately with a good regulator you can turn up PA level.
#define MY_RF24_PA_LEVEL RF24_PA_LOW
// Enable serial gateway
#define MY_GATEWAY_SERIAL
// Define a lower baud rate for Arduinos running on 8 MHz (Arduino Pro Mini 3.3V & SenseBender)
#if F_CPU == 8000000L
#define MY_BAUD_RATE 38400
#endif
// Enable inclusion mode
//#define MY_INCLUSION_MODE_FEATURE
// Enable Inclusion mode button on gateway
//#define MY_INCLUSION_BUTTON_FEATURE
// Inverses behavior of inclusion button (if using external pullup)
//#define MY_INCLUSION_BUTTON_EXTERNAL_PULLUP
// Set inclusion mode duration (in seconds)
#define MY_INCLUSION_MODE_DURATION 60
// Digital pin used for inclusion mode button
//#define MY_INCLUSION_MODE_BUTTON_PIN 3
// Set blinking period
#define MY_DEFAULT_LED_BLINK_PERIOD 300
// Inverses the behavior of leds
//#define MY_WITH_LEDS_BLINKING_INVERSE
// Flash leds on rx/tx/err
// Uncomment to override default HW configurations
//#define MY_DEFAULT_ERR_LED_PIN 4 // Error led pin
//#define MY_DEFAULT_RX_LED_PIN 6 // Receive led pin
//#define MY_DEFAULT_TX_LED_PIN 5 // the PCB, on board LED
#include <SPI.h>
#include <MySensors.h>
#include <Bounce2.h>
#define RELAY_PIN0 22 // Arduino Digital I/O pin number for relay
#define RELAY_PIN1 23
#define RELAY_PIN2 24
#define RELAY_PIN3 25
#define RELAY_PIN4 26 // Arduino Digital I/O pin number for relay
#define RELAY_PIN5 27
#define RELAY_PIN6 28
#define RELAY_PIN7 29
#define RELAY_PIN8 30 // Arduino Digital I/O pin number for relay
#define RELAY_PIN9 31
#define RELAY_PIN10 32
#define RELAY_PIN11 33
#define RELAY_PIN12 34 // Arduino Digital I/O pin number for relay
#define RELAY_PIN13 35
#define RELAY_PIN14 36
#define RELAY_PIN15 37
#define RELAY_PIN16 38
#define RELAY_PIN17 39 // Arduino Digital I/O pin number for relay
#define RELAY_PIN18 40
#define RELAY_PIN19 41
#define RELAY_PIN20 42
#define BUTTON_PIN0 A0 // Arduino Digital I/O pin number for button
#define BUTTON_PIN1 A1 // Arduino Digital I/O pin number for button
#define BUTTON_PIN2 A2 // Arduino Digital I/O pin number for button
#define BUTTON_PIN3 A3 // Arduino Digital I/O pin number for button
#define BUTTON_PIN4 A4 // Arduino Digital I/O pin number for button
#define BUTTON_PIN5 A5 // Arduino Digital I/O pin number for button
#define BUTTON_PIN6 A6 // Arduino Digital I/O pin number for button
#define BUTTON_PIN7 A7 // Arduino Digital I/O pin number for button
#define BUTTON_PIN8 A8 // Arduino Digital I/O pin number for button
#define BUTTON_PIN9 A9 // Arduino Digital I/O pin number for button
#define BUTTON_PIN10 A10 // Arduino Digital I/O pin number for button
#define BUTTON_PIN11 A11 // Arduino Digital I/O pin number for button
#define BUTTON_PIN12 A12 // Arduino Digital I/O pin number for button
#define BUTTON_PIN13 A13 // Arduino Digital I/O pin number for button
#define BUTTON_PIN14 A14 // Arduino Digital I/O pin number for button
#define BUTTON_PIN15 53 // Arduino Digital I/O pin number for button
#define BUTTON_PIN16 52 // Arduino Digital I/O pin number for button
#define BUTTON_PIN17 51 // Arduino Digital I/O pin number for button
#define BUTTON_PIN18 50 // Arduino Digital I/O pin number for button
#define BUTTON_PIN19 49 // Arduino Digital I/O pin number for button
#define BUTTON_PIN20 48 // Arduino Digital I/O pin number for button
#define CHILD0_ID 100 // Id of the sensor child
#define CHILD1_ID 101 // Id of the sensor child
#define CHILD2_ID 102 // Id of the sensor child
#define CHILD3_ID 103 // Id of the sensor child
#define CHILD4_ID 104 // Id of the sensor child
#define CHILD5_ID 105 // Id of the sensor child
#define CHILD6_ID 106 // Id of the sensor child
#define CHILD7_ID 107 // Id of the sensor child
#define CHILD8_ID 108 // Id of the sensor child
#define CHILD9_ID 109 // Id of the sensor child
#define CHILD10_ID 110 // Id of the sensor child
#define CHILD11_ID 111 // Id of the sensor child
#define CHILD12_ID 112 // Id of the sensor child
#define CHILD13_ID 113 // Id of the sensor child
#define CHILD14_ID 114 // Id of the sensor child
#define CHILD15_ID 115 // Id of the sensor child
#define CHILD16_ID 116 // Id of the sensor child
#define CHILD17_ID 117 // Id of the sensor child
#define CHILD18_ID 118 // Id of the sensor child
#define CHILD19_ID 119 // Id of the sensor child
#define CHILD20_ID 120 // Id of the sensor child
#define RELAY_ON 1
#define RELAY_OFF 0
//A B C D E F G H I J K L M N O P R S T W X
Bounce debouncerA = Bounce(); //1
Bounce debouncerB = Bounce();
Bounce debouncerC = Bounce();
Bounce debouncerD = Bounce();
Bounce debouncerE = Bounce(); //5
Bounce debouncerF = Bounce();
Bounce debouncerG = Bounce();
Bounce debouncerH = Bounce();
Bounce debouncerI = Bounce();
Bounce debouncerJ = Bounce(); //10
Bounce debouncerK = Bounce();
Bounce debouncerL = Bounce();
Bounce debouncerM = Bounce();
Bounce debouncerN = Bounce();
Bounce debouncerO = Bounce(); //15
Bounce debouncerP = Bounce();
Bounce debouncerR = Bounce();
Bounce debouncerS = Bounce();
Bounce debouncerT = Bounce();
Bounce debouncerW = Bounce(); //20
Bounce debouncerX = Bounce();
//A B C D E F G H I J K L M N O P R S T W X
int oldValueA = 0; //1
int oldValueB = 0;
int oldValueC = 0;
int oldValueD = 0;
int oldValueE = 0; //5
int oldValueF = 0;
int oldValueG = 0;
int oldValueH = 0;
int oldValueI = 0;
int oldValueJ = 0; //10
int oldValueK = 0;
int oldValueL = 0;
int oldValueM = 0;
int oldValueN = 0;
int oldValueO = 0; //15
int oldValueP = 0;
int oldValueR = 0;
int oldValueS = 0;
int oldValueT = 0;
int oldValueW = 0; //20
int oldValueX = 0;
//A B C D E F G H I J K L M N O P R S T W X
bool stateA = false; //1
bool stateB = false;
bool stateC = false;
bool stateD = false;
bool stateE = false; //5
bool stateF = false;
bool stateG = false;
bool stateH = false;
bool stateI = false;
bool stateJ = false; //10
bool stateK = false;
bool stateL = false;
bool stateM = false;
bool stateN = false;
bool stateO = false; //15
bool stateP = false;
bool stateR = false;
bool stateS = false;
bool stateT = false;
bool stateW = false; //20
bool stateX = false;
//A B C D E F G H I J K L M N O P R S T W X
MyMessage msgA(CHILD0_ID, V_LIGHT); //1
MyMessage msgB(CHILD1_ID, V_LIGHT);
MyMessage msgC(CHILD2_ID, V_LIGHT);
MyMessage msgD(CHILD3_ID, V_LIGHT);
MyMessage msgE(CHILD4_ID, V_LIGHT); //5
MyMessage msgF(CHILD5_ID, V_LIGHT);
MyMessage msgG(CHILD6_ID, V_LIGHT);
MyMessage msgH(CHILD7_ID, V_LIGHT);
MyMessage msgI(CHILD8_ID, V_LIGHT);
MyMessage msgJ(CHILD9_ID, V_LIGHT); //10
MyMessage msgK(CHILD10_ID, V_LIGHT);
MyMessage msgL(CHILD11_ID, V_LIGHT);
MyMessage msgM(CHILD12_ID, V_LIGHT);
MyMessage msgN(CHILD13_ID, V_LIGHT);
MyMessage msgO(CHILD14_ID, V_LIGHT); //15
MyMessage msgP(CHILD15_ID, V_LIGHT);
MyMessage msgR(CHILD16_ID, V_LIGHT);
MyMessage msgS(CHILD17_ID, V_LIGHT);
MyMessage msgT(CHILD18_ID, V_LIGHT);
MyMessage msgW(CHILD19_ID, V_LIGHT); //20
MyMessage msgX(CHILD20_ID, V_LIGHT);
void setup()
{
// Setup the button
pinMode(BUTTON_PIN0, INPUT_PULLUP); //1
pinMode(BUTTON_PIN1, INPUT_PULLUP);
pinMode(BUTTON_PIN2, INPUT_PULLUP);
pinMode(BUTTON_PIN3, INPUT_PULLUP);
pinMode(BUTTON_PIN4, INPUT_PULLUP); //5
pinMode(BUTTON_PIN5, INPUT_PULLUP);
pinMode(BUTTON_PIN6, INPUT_PULLUP);
pinMode(BUTTON_PIN7, INPUT_PULLUP);
pinMode(BUTTON_PIN8, INPUT_PULLUP);
pinMode(BUTTON_PIN9, INPUT_PULLUP); //10
pinMode(BUTTON_PIN10, INPUT_PULLUP);
pinMode(BUTTON_PIN11, INPUT_PULLUP);
pinMode(BUTTON_PIN12, INPUT_PULLUP);
pinMode(BUTTON_PIN13, INPUT_PULLUP);
pinMode(BUTTON_PIN14, INPUT_PULLUP); //15
pinMode(BUTTON_PIN15, INPUT_PULLUP);
pinMode(BUTTON_PIN16, INPUT_PULLUP);
pinMode(BUTTON_PIN17, INPUT_PULLUP);
pinMode(BUTTON_PIN18, INPUT_PULLUP);
pinMode(BUTTON_PIN19, INPUT_PULLUP); //20
pinMode(BUTTON_PIN20, INPUT_PULLUP);
// After setting up the button, setup debouncer
debouncerA.attach(BUTTON_PIN0); //1
debouncerA.interval(5);
debouncerB.attach(BUTTON_PIN1);
debouncerB.interval(5);
debouncerC.attach(BUTTON_PIN2);
debouncerC.interval(5);
debouncerD.attach(BUTTON_PIN3);
debouncerD.interval(5);
debouncerE.attach(BUTTON_PIN4); //5
debouncerE.interval(5);
debouncerF.attach(BUTTON_PIN5);
debouncerF.interval(5);
debouncerG.attach(BUTTON_PIN6);
debouncerG.interval(5);
debouncerH.attach(BUTTON_PIN7);
debouncerH.interval(5);
debouncerI.attach(BUTTON_PIN8);
debouncerI.interval(5);
debouncerJ.attach(BUTTON_PIN9); //10
debouncerJ.interval(5);
debouncerK.attach(BUTTON_PIN10);
debouncerK.interval(5);
debouncerL.attach(BUTTON_PIN11);
debouncerL.interval(5);
debouncerM.attach(BUTTON_PIN12);
debouncerM.interval(5);
debouncerN.attach(BUTTON_PIN13);
debouncerN.interval(5);
debouncerO.attach(BUTTON_PIN14); //15
debouncerO.interval(5);
debouncerP.attach(BUTTON_PIN15);
debouncerP.interval(5);
debouncerR.attach(BUTTON_PIN16);
debouncerR.interval(5);
debouncerS.attach(BUTTON_PIN17);
debouncerS.interval(5);
debouncerT.attach(BUTTON_PIN18);
debouncerT.interval(5);
debouncerW.attach(BUTTON_PIN19); //20
debouncerW.interval(5);
debouncerX.attach(BUTTON_PIN20);
debouncerX.interval(5);
// Make sure relays are off when starting up
digitalWrite(RELAY_PIN0, RELAY_OFF); //1
digitalWrite(RELAY_PIN1, RELAY_OFF);
digitalWrite(RELAY_PIN2, RELAY_OFF);
digitalWrite(RELAY_PIN3, RELAY_OFF);
digitalWrite(RELAY_PIN4, RELAY_OFF); //5
digitalWrite(RELAY_PIN5, RELAY_OFF);
digitalWrite(RELAY_PIN6, RELAY_OFF);
digitalWrite(RELAY_PIN7, RELAY_OFF);
digitalWrite(RELAY_PIN8, RELAY_OFF);
digitalWrite(RELAY_PIN9, RELAY_OFF); //10
digitalWrite(RELAY_PIN10, RELAY_OFF);
digitalWrite(RELAY_PIN11, RELAY_OFF);
digitalWrite(RELAY_PIN12, RELAY_OFF);
digitalWrite(RELAY_PIN13, RELAY_OFF);
digitalWrite(RELAY_PIN14, RELAY_OFF); //15
digitalWrite(RELAY_PIN15, RELAY_OFF);
digitalWrite(RELAY_PIN16, RELAY_OFF);
digitalWrite(RELAY_PIN17, RELAY_OFF);
digitalWrite(RELAY_PIN18, RELAY_OFF);
digitalWrite(RELAY_PIN19, RELAY_OFF); //20
digitalWrite(RELAY_PIN20, RELAY_OFF);
// Then set relay pins in output mode
pinMode(RELAY_PIN0, OUTPUT); //1
pinMode(RELAY_PIN1, OUTPUT);
pinMode(RELAY_PIN2, OUTPUT);
pinMode(RELAY_PIN3, OUTPUT);
pinMode(RELAY_PIN4, OUTPUT); //5
pinMode(RELAY_PIN5, OUTPUT);
pinMode(RELAY_PIN6, OUTPUT);
pinMode(RELAY_PIN7, OUTPUT);
pinMode(RELAY_PIN8, OUTPUT);
pinMode(RELAY_PIN9, OUTPUT); //10
pinMode(RELAY_PIN10, OUTPUT);
pinMode(RELAY_PIN11, OUTPUT);
pinMode(RELAY_PIN12, OUTPUT);
pinMode(RELAY_PIN13, OUTPUT);
pinMode(RELAY_PIN14, OUTPUT); //15
pinMode(RELAY_PIN15, OUTPUT);
pinMode(RELAY_PIN16, OUTPUT);
pinMode(RELAY_PIN17, OUTPUT);
pinMode(RELAY_PIN18, OUTPUT);
pinMode(RELAY_PIN19, OUTPUT); //20
pinMode(RELAY_PIN20, OUTPUT);
}
void presentation() {
// Send the sketch version information to the gateway and Controller
sendSketchInfo("21 Relay & button", "2.0");
// Register all sensors to gw (they will be created as child devices)
present(CHILD0_ID, S_LIGHT);
present(CHILD1_ID, S_LIGHT);
present(CHILD2_ID, S_LIGHT);
present(CHILD3_ID, S_LIGHT);
present(CHILD4_ID, S_LIGHT); //5
present(CHILD5_ID, S_LIGHT);
present(CHILD6_ID, S_LIGHT);
present(CHILD7_ID, S_LIGHT);
present(CHILD8_ID, S_LIGHT);
present(CHILD9_ID, S_LIGHT); //10
present(CHILD10_ID, S_LIGHT);
present(CHILD11_ID, S_LIGHT);
present(CHILD12_ID, S_LIGHT);
present(CHILD13_ID, S_LIGHT);
present(CHILD14_ID, S_LIGHT); //15
present(CHILD15_ID, S_LIGHT);
present(CHILD16_ID, S_LIGHT);
present(CHILD17_ID, S_LIGHT);
present(CHILD18_ID, S_LIGHT);
present(CHILD19_ID, S_LIGHT); //20
present(CHILD20_ID, S_LIGHT);
}
/*
Example on how to asynchronously check for new messages from gw
*/
void loop()
{
debouncerA.update();
// Get the update value
int valueA = debouncerA.read();
if (valueA != oldValueA) {
send(msgA.set(stateA ? false : true), false); // Send new state and request ack back
stateA = stateA ? false : true;
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueA = valueA;
debouncerB.update();
// Get the update value
int valueB = debouncerB.read();
if (valueB != oldValueB) {
send(msgB.set(stateB ? false : true), false); // Send new state and request ack back
stateB = stateB ? false : true;
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueB = valueB;
debouncerC.update();
// Get the update value
int valueC = debouncerC.read();
if (valueC != oldValueC) {
send(msgC.set(stateC ? false : true), false); // Send new state and request ack back
stateC = stateC ? false : true;
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueC = valueC;
debouncerD.update();
// Get the update value
int valueD = debouncerD.read();
if (valueD != oldValueD) {
send(msgD.set(stateD ? false : true), false); // Send new state and request ack back
stateD = stateD ? false : true;
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueD = valueD;
debouncerE.update();
// Get the update value
int valueE = debouncerE.read();
if (valueE != oldValueE) {
send(msgE.set(stateE ? false : true), false); // Send new state and request ack back
stateE = stateE ? false : true;
digitalWrite(RELAY_PIN4, stateE ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueE = valueE; //5
debouncerF.update();
// Get the update value
int valueF = debouncerF.read();
if (valueF != oldValueF) {
send(msgF.set(stateF ? false : true), false); // Send new state and request ack back
stateF = stateF ? false : true;
digitalWrite(RELAY_PIN5, stateF ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueF = valueF;
debouncerG.update();
// Get the update value
int valueG = debouncerG.read();
if (valueG != oldValueG) {
send(msgG.set(stateG ? false : true), false); // Send new state and request ack back
stateG = stateG ? false : true;
digitalWrite(RELAY_PIN6, stateG ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueG = valueG;
debouncerH.update();
// Get the update value
int valueH = debouncerH.read();
if (valueH != oldValueH) {
send(msgH.set(stateH ? false : true), false); // Send new state and request ack back
stateH = stateH ? false : true;
digitalWrite(RELAY_PIN7, stateH ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueH = valueH;
debouncerI.update();
// Get the update value
int valueI = debouncerI.read();
if (valueI != oldValueI) {
send(msgI.set(stateI ? false : true), false); // Send new state and request ack back
stateI = stateI ? false : true;
digitalWrite(RELAY_PIN8, stateI ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueI = valueI;
debouncerJ.update();
// Get the update value
int valueJ = debouncerJ.read();
if (valueJ != oldValueJ) {
send(msgJ.set(stateJ ? false : true), false); // Send new state and request ack back
stateJ = stateJ ? false : true;
digitalWrite(RELAY_PIN9, stateJ ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueJ = valueJ; //10
debouncerK.update();
// Get the update value
int valueK = debouncerK.read();
if (valueK != oldValueK) {
send(msgK.set(stateK ? false : true), false); // Send new state and request ack back
stateK = stateK ? false : true;
digitalWrite(RELAY_PIN10, stateK ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueK = valueK;
debouncerL.update();
// Get the update value
int valueL = debouncerL.read();
if (valueL != oldValueL) {
send(msgL.set(stateL ? false : true), false); // Send new state and request ack back
stateL = stateL ? false : true;
digitalWrite(RELAY_PIN11, stateL ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueL = valueL;
debouncerM.update();
// Get the update value
int valueM = debouncerM.read();
if (valueM != oldValueM) {
send(msgM.set(stateM ? false : true), false); // Send new state and request ack back
stateM = stateM ? false : true;
digitalWrite(RELAY_PIN12, stateM ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueM = valueM;
debouncerN.update();
// Get the update value
int valueN = debouncerN.read();
if (valueN != oldValueN) {
send(msgN.set(stateN ? false : true), false); // Send new state and request ack back
stateN = stateN ? false : true;
digitalWrite(RELAY_PIN13, stateN ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueN = valueN;
debouncerO.update();
// Get the update value
int valueO = debouncerO.read();
if (valueO != oldValueO) {
send(msgO.set(stateO ? false : true), false); // Send new state and request ack back
stateO = stateO ? false : true;
digitalWrite(RELAY_PIN14, stateO ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueO = valueO; //15
debouncerP.update();
// Get the update value
int valueP = debouncerP.read();
if (valueP != oldValueP) {
send(msgP.set(stateP ? false : true), false); // Send new state and request ack back
stateP = stateP ? false : true;
digitalWrite(RELAY_PIN15, stateP ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueP = valueP;
debouncerR.update();
// Get the update value
int valueR = debouncerR.read();
if (valueR != oldValueR) {
send(msgR.set(stateR ? false : true), false); // Send new state and request ack back
stateR = stateR ? false : true;
digitalWrite(RELAY_PIN16, stateR ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueR = valueR;
debouncerS.update();
// Get the update value
int valueS = debouncerS.read();
if (valueS != oldValueS) {
send(msgS.set(stateS ? false : true), false); // Send new state and request ack back
stateS = stateS ? false : true;
digitalWrite(RELAY_PIN17, stateS ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueS = valueS;
debouncerT.update();
// Get the update value
int valueT = debouncerT.read();
if (valueT != oldValueT) {
send(msgT.set(stateT ? false : true), false); // Send new state and request ack back
stateT = stateT ? false : true;
digitalWrite(RELAY_PIN18, stateT ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueT = valueT;
debouncerW.update();
// Get the update value
int valueW = debouncerW.read();
if (valueW != oldValueW) {
send(msgW.set(stateW ? false : true), false); // Send new state and request ack back
stateW = stateW ? false : true;
digitalWrite(RELAY_PIN19, stateW ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueW = valueW; //20
debouncerX.update();
// Get the update value
int valueX = debouncerX.read();
if (valueX != oldValueX) {
send(msgX.set(stateX ? false : true), false); // Send new state and request ack back
stateX = stateX ? false : true;
digitalWrite(RELAY_PIN20, stateX ? RELAY_ON : RELAY_OFF); // toggle the relay
}
oldValueX = valueX;
}
void receive(const MyMessage &message) {
// We only expect one type of message from controller. But we better check anyway.
if (message.type == V_LIGHT) {
switch (message.sensor) {
case CHILD0_ID:
stateA = message.getBool();
digitalWrite(RELAY_PIN0, stateA ? RELAY_ON : RELAY_OFF);
saveState(CHILD0_ID, stateA);
break;
case CHILD1_ID:
stateB = message.getBool();
digitalWrite(RELAY_PIN1, stateB ? RELAY_ON : RELAY_OFF);
saveState(CHILD1_ID, stateB);
break;
case CHILD2_ID:
stateC = message.getBool();
digitalWrite(RELAY_PIN2, stateC ? RELAY_ON : RELAY_OFF);
saveState(CHILD2_ID, stateC);
break;
case CHILD3_ID:
stateD = message.getBool();
digitalWrite(RELAY_PIN3, stateD ? RELAY_ON : RELAY_OFF);
saveState(CHILD3_ID, stateD);
break;
case CHILD4_ID:
stateE = message.getBool();
digitalWrite(RELAY_PIN4, stateE ? RELAY_ON : RELAY_OFF);
saveState(CHILD4_ID, stateE);
break; //5
case CHILD5_ID:
stateF = message.getBool();
digitalWrite(RELAY_PIN5, stateF ? RELAY_ON : RELAY_OFF);
saveState(CHILD5_ID, stateF);
break;
case CHILD6_ID:
stateG = message.getBool();
digitalWrite(RELAY_PIN6, stateG ? RELAY_ON : RELAY_OFF);
saveState(CHILD6_ID, stateG);
break;
case CHILD7_ID:
stateH = message.getBool();
digitalWrite(RELAY_PIN7, stateH ? RELAY_ON : RELAY_OFF);
saveState(CHILD7_ID, stateH);
break;
case CHILD8_ID:
stateI = message.getBool();
digitalWrite(RELAY_PIN8, stateI ? RELAY_ON : RELAY_OFF);
saveState(CHILD8_ID, stateI);
break;
case CHILD9_ID:
stateJ = message.getBool();
digitalWrite(RELAY_PIN9, stateJ ? RELAY_ON : RELAY_OFF);
saveState(CHILD9_ID, stateJ);
break; //10
case CHILD10_ID:
stateK = message.getBool();
digitalWrite(RELAY_PIN10, stateK ? RELAY_ON : RELAY_OFF);
saveState(CHILD10_ID, stateK);
break;
case CHILD11_ID:
stateL = message.getBool();
digitalWrite(RELAY_PIN11, stateL ? RELAY_ON : RELAY_OFF);
saveState(CHILD11_ID, stateL);
break;
case CHILD12_ID:
stateM = message.getBool();
digitalWrite(RELAY_PIN12, stateM ? RELAY_ON : RELAY_OFF);
saveState(CHILD12_ID, stateM);
break;
case CHILD13_ID:
stateN = message.getBool();
digitalWrite(RELAY_PIN13, stateN ? RELAY_ON : RELAY_OFF);
saveState(CHILD13_ID, stateN);
break;
case CHILD14_ID:
stateO = message.getBool();
digitalWrite(RELAY_PIN14, stateO ? RELAY_ON : RELAY_OFF);
saveState(CHILD14_ID, stateO);
break; //15
case CHILD15_ID:
stateP = message.getBool();
digitalWrite(RELAY_PIN15, stateP ? RELAY_ON : RELAY_OFF);
saveState(CHILD15_ID, stateP);
break;
case CHILD16_ID:
stateR = message.getBool();
digitalWrite(RELAY_PIN16, stateR ? RELAY_ON : RELAY_OFF);
saveState(CHILD16_ID, stateR);
break;
case CHILD17_ID:
stateS = message.getBool();
digitalWrite(RELAY_PIN17, stateS ? RELAY_ON : RELAY_OFF);
saveState(CHILD17_ID, stateS);
break;
case CHILD18_ID:
stateT = message.getBool();
digitalWrite(RELAY_PIN18, stateT ? RELAY_ON : RELAY_OFF);
saveState(CHILD18_ID, stateT);
break;
case CHILD19_ID:
stateW = message.getBool();
digitalWrite(RELAY_PIN19, stateW ? RELAY_ON : RELAY_OFF);
saveState(CHILD19_ID, stateW);
break; //20
case CHILD20_ID:
stateX = message.getBool();
digitalWrite(RELAY_PIN20, stateX ? RELAY_ON : RELAY_OFF);
saveState(CHILD20_ID, stateX);
break;
}
// Write some debug info
Serial.print("Incoming change for sensor:");
Serial.print(message.sensor);
Serial.print(", New status: ");
Serial.println(message.getBool());
}
}
Powyższy kod obsługuje 21 sterowników Bistabilnych oraz przełączników.